
Description:
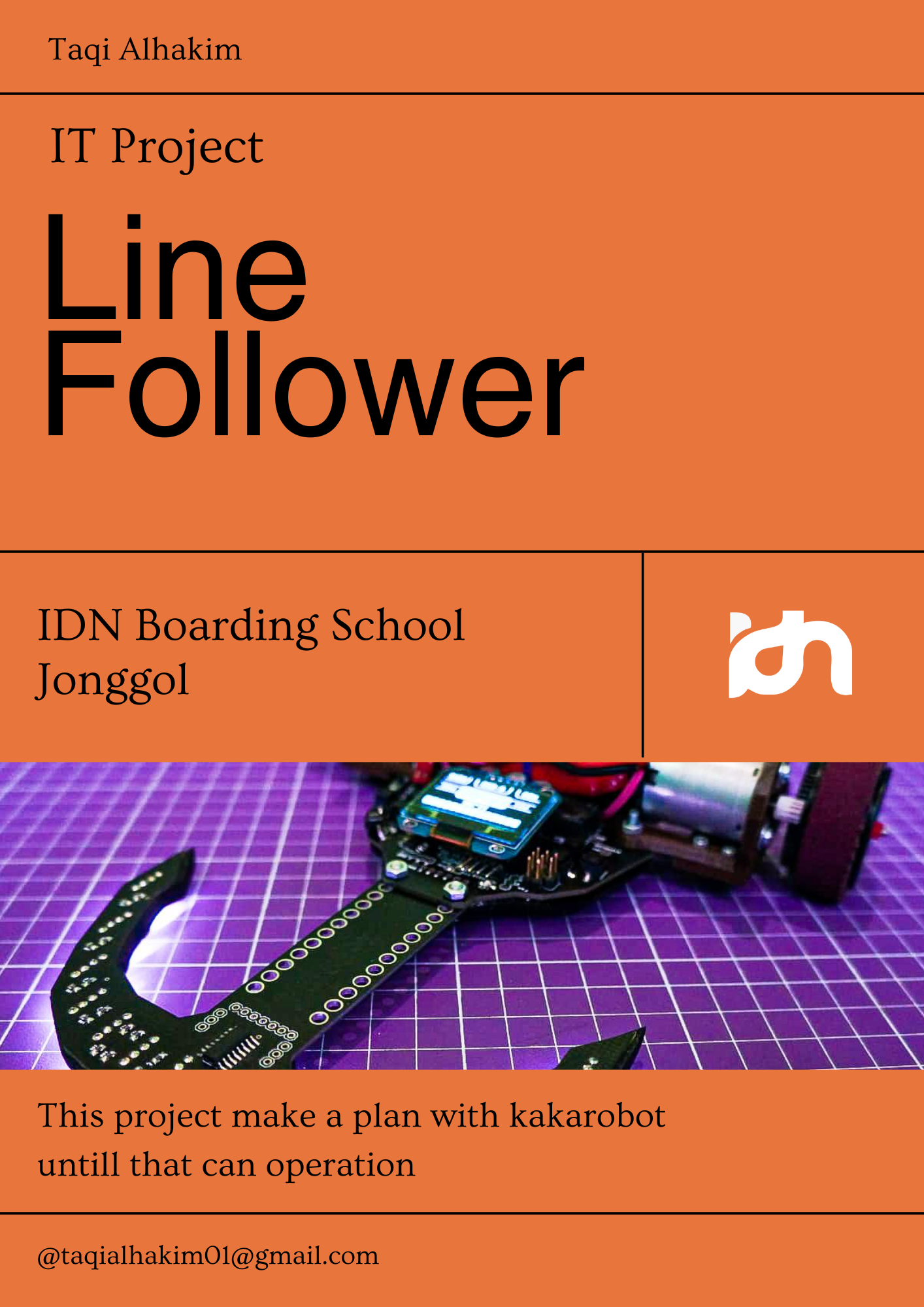
This project focuses on building a line follower robot capable of navigating paths using sensor-based guidance. The robot will detect and follow a black line on a white surface, utilizing infrared sensors for accuracy. Its design integrates efficient coding and precise motor control to ensure smooth movement and quick turns. The goal is to create a reliable, responsive robot that can adapt to various track patterns. This project emphasizes hands-on experience with electronics, programming, and problem-solving. The final output will be a functional prototype, tested on different tracks for performance evaluation.