Description:
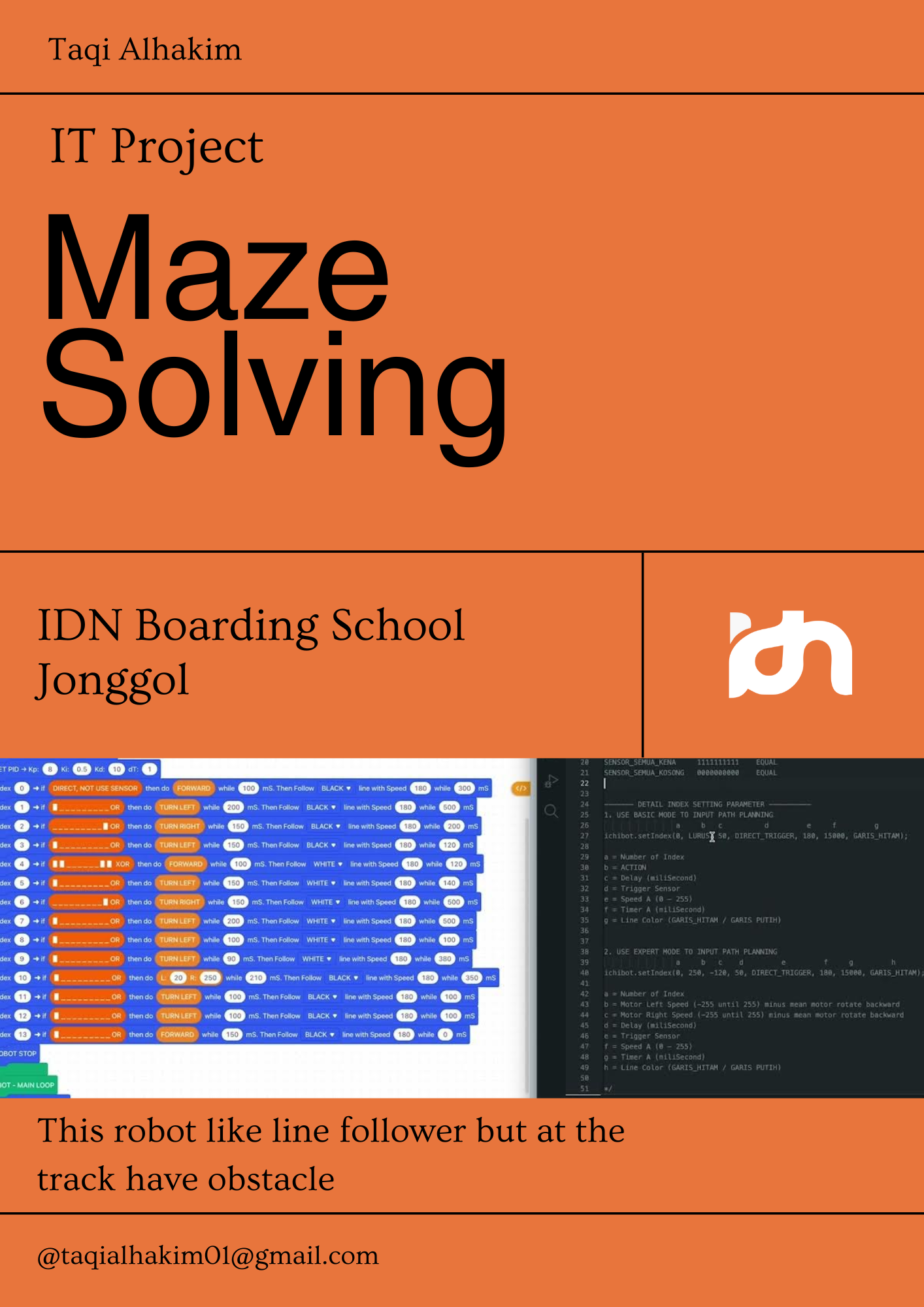
The Maze Solving Robot project aims to design an autonomous robot capable of finding its way out of a maze. The robot is equipped with proximity sensors and mapping algorithms to recognize walls and paths. Search algorithms such as “Depth First Search” or “Breadth First Search” are used to decide the correct direction. The robot will continuously update its internal map during exploration to avoid dead ends. The robot’s design prioritizes speed, accuracy, and energy efficiency. The project combines programming, electronics, and sensor processing techniques to achieve autonomous navigation.